Research Interests
Automatic Control and Diagnostic for Autonomous Systems:
- Combined control systems and machine learning
- Fault-tolerant control systems (FTC)
- Estimation and filtering techniques
- System modeling
- Fault detection and isolation systems (FDI)
Applications to Aeronautic Projects:
- Flight control, reconfigurable flight control, fault-tolerant flight control
- Guidance and navigation systems
- Attitude estimation
- Control allocation
Avionics Integration, Autopilot Hardware/Software Design, Real Flight Experiments
The flying platforms for which I designed simulators, flight controllers and guidance systems include the following vehicles:- Fixed wing aircraft
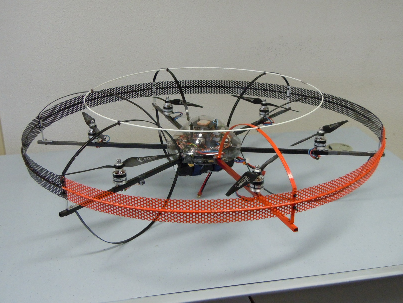
- Multi-rotor helicopters
- Hybrid/convertible VTOL aircraft
- Airships
Multirotor Helicopters
|

|
Fixed_wing Aircraft

|

|
Hybrid or convertible VTOL Vehicles
 |
This hybrid vehicle is capable of vertical take off and landing (VTOL), and transitions to forward flight. |
Vision Motion Tracking Setup

|
Since 2013, the Lab is equipped with a motion capture system: 8 cameras Optitrack S250e running at a maximum frame rate of 250 FPS are mounted in the ceiling of our experiments room (see left picture). This equipment enables us to have a ground truth for our attitude estimation and position control algorithms, for example. 
|
Past Activities
Flying Machine Arena, ETH Zurich
"Simulation, Control and Guidance of a Swarm of Quadricopters" for the
Flying Machine Arena (FMA).
I contributed to the initial setup of the FMA. I designed the very first flight control and guidance systems for the quadrocopters. I also developed the first version of the simulator, which enabled the design and debug of various flight controllers, guidance algorithms, and multi-vehicle coordinated flights.
Details here.
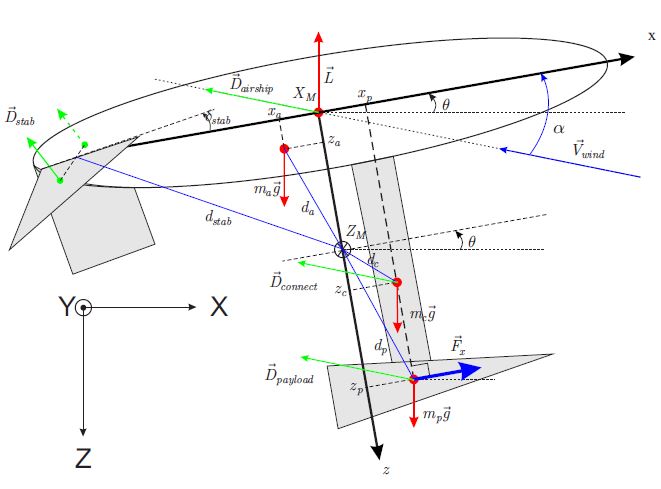
Simulation and Flight Control Design of an Airship
Should you be interested, please feel free to contact me.