
Research
Research on Aerial Robotics
Ongoing projects: ANR DACAR (2018-2022), ALCYON Rapid DGA (2017-2020)
Since the last two decades, OSCAR’s members have made significant contributions in the fields of Visual Servo Control, Nonlinear Observer and Nonlinear Control applied to Unmanned Aerial Vehicles (UAV). We have been successful in applying our theoretical results to a wide range of practically motivated problems such as:

The focus of this activity direction is to bring our knowledge and techniques in Visual Servo Control, Nonlinear Observer and Nonlinear Control theories (which has been developed for Aerial robotics) to the field of Marine and Underwater Robotics that exhibits new challenges and opportunities. Since 7 years OSCAR team has been active in Marine and Underwater Robotics via its involvement in 4 National and European projects. Some visual servoing solutions for Autonomous Underwater Vehicles (such as stabilization in front of a visual target, pipeline following) have been successfully developed and validated via the collaborations with the team’s industrial partners (CYBERNETIX, ALSEAMAR).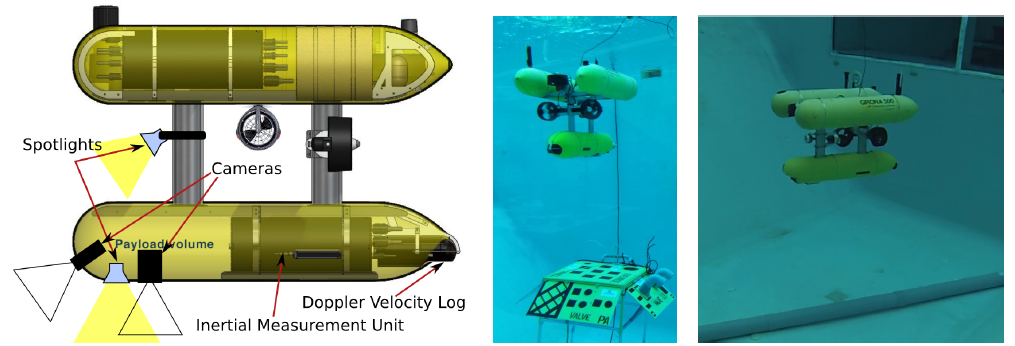
OSCAR team has recently developed a man-portable underwater robotic vehicle to facilitate experimental validations of the developed control and estimation algorithms. In particular, a novel homography-based visual servoing algorithm without relying on a costly velocity sensor (e.g. DVL) has been successfully validated with this platform for the station keeping application. These experimental demonstrations of this low-cost solution have attracted a number of specialized companies (e.g. ALSEAMAR).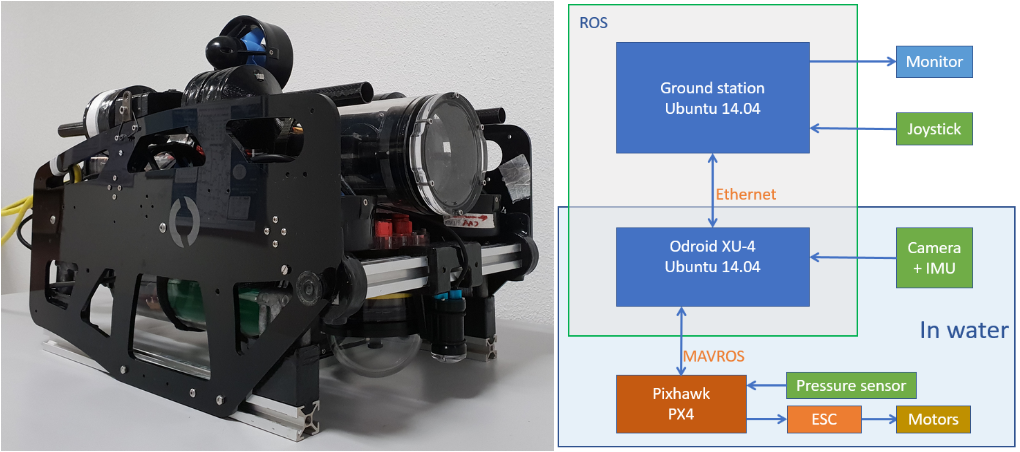
The AUV platform and Hardware/Software architecture developped by I3S-OSCAR team
Since the last two decades, OSCAR’s members have made significant contributions in the fields of Visual Servo Control, Nonlinear Observer and Nonlinear Control applied to Unmanned Aerial Vehicles (UAV). We have been successful in applying our theoretical results to a wide range of practically motivated problems such as:
- Path following and trajectory tracking of UAVs (quadrotors, scale-model airplanes);
- Landing a quadrotor UAV on a moving platform using optical flow;
- Visual servoing of UAVs;
- Haptic-based bilateral teleoperation of UAVs;
- Attitude (i.e. orientation) estimation using an Inertial Measurement Unit (IMU); etc.
The quadrotor and the scale-model airplane developed by I3S-OSCAR team
The convertible UAV of I3S-OSCAR team
Ongoing projects: ANR ASTRID CONGRE (2019-2021), FUI GREENEXPLORER (2017-2021)Research on Marine and Underwater Robotics
The focus of this activity direction is to bring our knowledge and techniques in Visual Servo Control, Nonlinear Observer and Nonlinear Control theories (which has been developed for Aerial robotics) to the field of Marine and Underwater Robotics that exhibits new challenges and opportunities. Since 7 years OSCAR team has been active in Marine and Underwater Robotics via its involvement in 4 National and European projects. Some visual servoing solutions for Autonomous Underwater Vehicles (such as stabilization in front of a visual target, pipeline following) have been successfully developed and validated via the collaborations with the team’s industrial partners (CYBERNETIX, ALSEAMAR).
The Girona-500 AUV (left) used by the company Cybernétix for experimental validations of our vision-based controllers for homography-based stabilization and positioning (middle) and for pipeline following (right)
OSCAR team has recently developed a man-portable underwater robotic vehicle to facilitate experimental validations of the developed control and estimation algorithms. In particular, a novel homography-based visual servoing algorithm without relying on a costly velocity sensor (e.g. DVL) has been successfully validated with this platform for the station keeping application. These experimental demonstrations of this low-cost solution have attracted a number of specialized companies (e.g. ALSEAMAR).
The AUV platform and Hardware/Software architecture developped by I3S-OSCAR team
Autonomous navigation of AUVs in an unknown or partially known and dynamically changing oceanic environment is challenging. Scientific issues are strongly related to the fact that the AUV may navigate in cluttered areas where global acoustic positioning systems are unusable or insufficiently precise for safe navigation. In this case, the AUV must rely on exteroceptive sensors and sensor-based navigation strategies. Although several types of sensors can be used, the video camera remains an excellent candidate as they are considerably cheaper than acoustic sensors and provide rich information at a high update rate. Among many applications related to vision-based control paradigm, we have investigated the two following relevant control problems of AUVs:Nonlinear Control and Sensor-based Control of Autonomous Underwater Vehicles
Vision-based stabilization and positioning: This functionality is useful for AUV navigation close to underwater infrastructures in the case when high-resolution imaging is needed for inspection or intervention tasks. In the context of monocular-vision, we have recently proposed a homography-based visual servoing (HBVS) control approach for fully-actuated AUVs, using the homography matrix that encodes transformation information between two images of the same planar target. The proposed control approach has been experimentally validated by our industrial collaborator Cybernétix on the Girona-500 AUV. An extension of this work to the case of absence of linear velocity measurements (i.e. DVL is not used) has been recently developed.
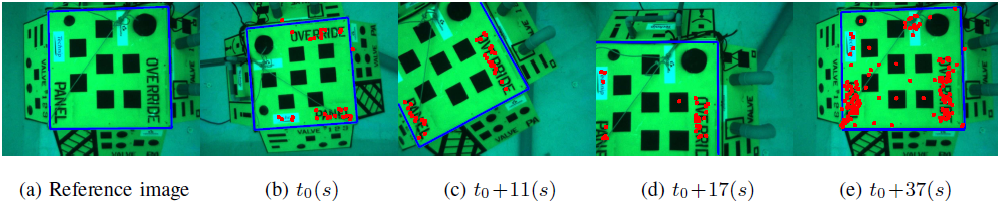
Validation of the proposed HBVS controller using a downward-looking camera: reference image and current images
Vision-based pipeline following: This problem is highly relevant for inspection of submerged linear infrastructures such as pipelines and cables by AUVs. We have proposed an IBVS controller for fully-actuated AUVs for pipeline/cable following using a monocular camera and using Plücker coordinates for the representation of lines. Experimental validations have been recently carried out by Cybernétix on the Girona-500 AUV.

Validation of the proposed vision-based controller for pipeline following: Initial image and current images during convergence
- Related publications:
- L.-H. Nguyen, M.-D. Hua, G. Allibert, T. Hamel. A homography-based dynamic control approach applied to station keeping of autonomous underwater vehicles without linear velocity measurements. Submitted to IEEE Transactions on Control Systems Technology, 2019.
- G. Allibert, M.-D. Hua, S. Krupínski, T. Hamel. Pipeline following by visual servoing for Autonomous Underwater Vehicles. Control Engineering Practice, Regular Paper, 82, 151-160, 2019.
- S. Krupínski, G. Allibert, M.-D. Hua, T. Hamel. An inertial-aided homography-based visual servo control approach for (almost) fully-actuated Autonomous Underwater Vehicles. IEEE Transactions on Robotics, Regular Paper, 33 (5), 1041-1060, 2017.
- L.-H. Nguyen, M.-D. Hua, G. Allibert, T. Hamel. Inertial-aided Homography-based Visual Servo Control of Autonomous Underwater Vehicles without Linear Velocity Measurements. In 21st International Conference on System Theory, Control and Computing (ICSTCC), pp. 9-16, 2017.
- S. Krupínski, R. Desouche, N. Palomeras, G. Allibert, M.-D. Hua. Pool testing of AUV visual servoing for autonomous inspection. In IFAC Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV’2015), Vol. 48, No. 2, pp. 274–280, 2015.
- M.-D. Hua, G. Allibert, S. Krupínski, T. Hamel. Homography-based visual servoing for autonomous underwater vehicles. In IFAC World Congress, Vol. 47, No. 3, pp. 5726-5733, 2014.
- S. Krupínski, G. Allibert, M.-D. Hua, T. Hamel. Pipeline tracking for fully-actuated autonomous underwater vehicle using visual servo control. In American Control Conference (ACC), 6196-6202, 2012.