Cartes stochastiques pour la recherche de sources polluantes sous-marines
Description
La difusion d'une source d'un produit chimique dans des régions litorales par un champ de courants dominant crée une distribution spatiale du produit fortement correlée avec la direction dominante des courants marins. Ces structures sont usuellemt appelées "plumes," terme qui rappelle la géometrie du champ de concentration spatiale du produit. La localisation de la source de plumes marines est un problème d'intéret dans le domaine de la surveillance environmentale (recherche de sources polluantes) et aussi dans le domaine de la guerre anti-mines (qui laissent échaper des traces des explosives). Depuis quelques années, plusieurs chercheurs se sont intéressés à l'utilisation de robots mobiles sous-marins équipés de capteurs capables de détecter le produit chimique dispersé dans l'environment pour résoudre ce problème.
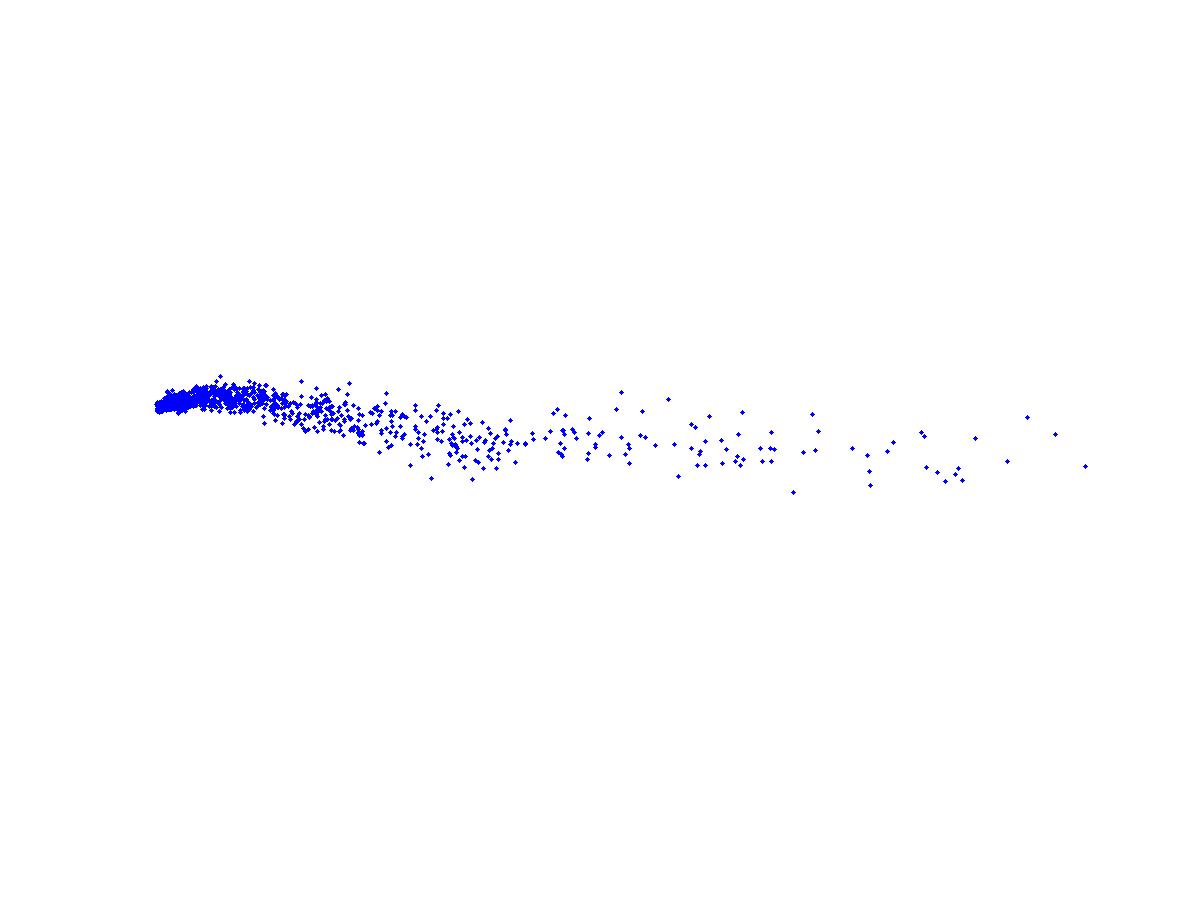
Sous des conditions d'écoulement turbulent, la distribution spatiale instantannée du produit chimique est fortement discontinue, comme dans l'exemple de la figure suivante, où les régions bleues indiquent les sites où la concentration du produit est supérieure à un certain seuil.
Ce caratère discontinu de la distribution spatiale du produit chimique rend impossible l'application de techniques de suivi de gradient pour la localisation de la source. Une alternative possible, mais inefficace, consiste à effectuer une observation complète de la région analysée. Dans le but de rendre plus efficace la tâche de recherche de la source, plusieurs auteurs ont proposé des stratégies de recherche complètement guidées par les mesures des capteurs. Ces stratégies sont en général inspirées du comportement de certaines espèces animales (langoustes, mites,..) et sont essenciellement du type surge-cast, alternant entre des périodes de déplacement en direction de la source à l'intérieur de la plume (surge) et des périodes de recherche locale de la plume autour des derniers points où le produit à été détecté (cast). Ces approches présentent plusieurs inconvénients: (i) leur comportement dépend d'un certain nombre de paramètres qui doivent être fixés en fonction du champ oservé, qui est inconnu, (ii) leur efficacité ne peut pas être déterminée facilement, (iii) les données sont utilisées d'une façon assimétrique (l'absence de détections jouant un rôle beaucoup moins important que les détections).
Nous avons proposé [1] pour ce problème une approche basée sur des modèles stochastiques de la concentration du produit sous un écoulement turbulent. Plus précisément, nous modélisons la géométrie de la région où le produit peut être détecté comme une réalisation d'un Ensemble Aléatoire fermé. Ces modèles probabilistes de formes géométriques sont originaires du domaine de la Géométrie Stochastique. Nous pouvons les considérer comme des processus doublement stochastiques, construits à l'aide de deux processus de base: un premier processus de points détermine un ensemble de positions dans l'espace, où sont placées des réalisations d'un deuxième processus de formes aléatoires. La figure précédante est une réalisation d'un ensemble aléatoire fermé, pour lequele le processus ponctuel est un processus de Poisson non-homogène (avec intensité plus élevée près de la source, et le long de la ligne centrale de la plume) et les réalisations du processus de formes sont des cercles de rayon uniformément distribué dans un interval fermé. Si nous considérons que les distributions des processus qui caractérisent l'ensemble aléatoire sont des fonctions de la localisation de la source et de la direction du flux (qui sont inconnus), nous pouvons formuler le problème de la recherche de la source du produit chimique comme un problème d'estimation paramétrique: étant données les observations du robot le long de sa trajectoire, quelle est la meilleure estimée de la position de la source? Nous remarquons que la direction du flux joue dans ce cas le rôle de paramètres de nuissance.
Si nous admettons une connaissance a priori sur la position de la source et sur la direction du flux décrite par une distribution de probabilité, ce problème d'estimation peut être résolu dans le cadre de la théorie de l'estimation Bayesienne, et conduit à la propagation de la densité de probabilité des paramètres estimés étant données les observations passées. La dépendance des observations (qui sont en général binaires, du type ON/OFF) dans les paramètres estimés est fortement non-linéaire et leur distribution non-Gaussienne, ce qui rend impossible l'application d'approximations du type filtre de Kalman Etendu. L'objectif de ce stage est la construction du filtre particulaire (qui est une approximation de dimension finie au filtre non-linéaire optimal) pour ce problème, et l'étude de la définition de stratégies de contrôle en fonction de la densité de probabilité a posteriori. Il comprendra plusieurs étapes:
Ce travail devra être réalisé à l'I3S.
Connaissances requises
L'étudiant(e) doit avoir des bonnes connaissances en Probabillités et Statistiques et en Traitement du Signal, et avoir une bonne expérience de programmation en C et en Matlab.
Contacts
Maria-João Rendas (rendas@i3s.unice.fr)
La difusion d'une source d'un produit chimique dans des régions litorales par un champ de courants dominant crée une distribution spatiale du produit fortement correlée avec la direction dominante des courants marins. Ces structures sont usuellemt appelées "plumes," terme qui rappelle la géometrie du champ de concentration spatiale du produit. La localisation de la source de plumes marines est un problème d'intéret dans le domaine de la surveillance environmentale (recherche de sources polluantes) et aussi dans le domaine de la guerre anti-mines (qui laissent échaper des traces des explosives). Depuis quelques années, plusieurs chercheurs se sont intéressés à l'utilisation de robots mobiles sous-marins équipés de capteurs capables de détecter le produit chimique dispersé dans l'environment pour résoudre ce problème.
Sous des conditions d'écoulement turbulent, la distribution spatiale instantannée du produit chimique est fortement discontinue, comme dans l'exemple de la figure suivante, où les régions bleues indiquent les sites où la concentration du produit est supérieure à un certain seuil.
Ce caratère discontinu de la distribution spatiale du produit chimique rend impossible l'application de techniques de suivi de gradient pour la localisation de la source. Une alternative possible, mais inefficace, consiste à effectuer une observation complète de la région analysée. Dans le but de rendre plus efficace la tâche de recherche de la source, plusieurs auteurs ont proposé des stratégies de recherche complètement guidées par les mesures des capteurs. Ces stratégies sont en général inspirées du comportement de certaines espèces animales (langoustes, mites,..) et sont essenciellement du type surge-cast, alternant entre des périodes de déplacement en direction de la source à l'intérieur de la plume (surge) et des périodes de recherche locale de la plume autour des derniers points où le produit à été détecté (cast). Ces approches présentent plusieurs inconvénients: (i) leur comportement dépend d'un certain nombre de paramètres qui doivent être fixés en fonction du champ oservé, qui est inconnu, (ii) leur efficacité ne peut pas être déterminée facilement, (iii) les données sont utilisées d'une façon assimétrique (l'absence de détections jouant un rôle beaucoup moins important que les détections).
Nous avons proposé [1] pour ce problème une approche basée sur des modèles stochastiques de la concentration du produit sous un écoulement turbulent. Plus précisément, nous modélisons la géométrie de la région où le produit peut être détecté comme une réalisation d'un Ensemble Aléatoire fermé. Ces modèles probabilistes de formes géométriques sont originaires du domaine de la Géométrie Stochastique. Nous pouvons les considérer comme des processus doublement stochastiques, construits à l'aide de deux processus de base: un premier processus de points détermine un ensemble de positions dans l'espace, où sont placées des réalisations d'un deuxième processus de formes aléatoires. La figure précédante est une réalisation d'un ensemble aléatoire fermé, pour lequele le processus ponctuel est un processus de Poisson non-homogène (avec intensité plus élevée près de la source, et le long de la ligne centrale de la plume) et les réalisations du processus de formes sont des cercles de rayon uniformément distribué dans un interval fermé. Si nous considérons que les distributions des processus qui caractérisent l'ensemble aléatoire sont des fonctions de la localisation de la source et de la direction du flux (qui sont inconnus), nous pouvons formuler le problème de la recherche de la source du produit chimique comme un problème d'estimation paramétrique: étant données les observations du robot le long de sa trajectoire, quelle est la meilleure estimée de la position de la source? Nous remarquons que la direction du flux joue dans ce cas le rôle de paramètres de nuissance.
Si nous admettons une connaissance a priori sur la position de la source et sur la direction du flux décrite par une distribution de probabilité, ce problème d'estimation peut être résolu dans le cadre de la théorie de l'estimation Bayesienne, et conduit à la propagation de la densité de probabilité des paramètres estimés étant données les observations passées. La dépendance des observations (qui sont en général binaires, du type ON/OFF) dans les paramètres estimés est fortement non-linéaire et leur distribution non-Gaussienne, ce qui rend impossible l'application d'approximations du type filtre de Kalman Etendu. L'objectif de ce stage est la construction du filtre particulaire (qui est une approximation de dimension finie au filtre non-linéaire optimal) pour ce problème, et l'étude de la définition de stratégies de contrôle en fonction de la densité de probabilité a posteriori. Il comprendra plusieurs étapes:
- l'étude du formalisme des Ensembles Aléatoires fermés (Random Closed Sets en anglais) et de leur simulation numérique
- l'étude des propriétés de la difusion par des flux turbulents (un grand nombre de publications sur ce sujet existent dans la litérature) de façon à connaître les caractéristiques déterminantes de la géométrie de la région où le produit est détecté,
- la construction de modèles d'ensembles alèatoires
fermés appropriés au problème
- l'étude des équations du filtre non-linéaire optimal Bayesien, et de la technique de filtrage particulaire
- la mise en œuvre du filtre particulaire pour l'estimation de la position de la source
- l'étude, sous simulation, de plusieurs stratégies
d'observation (mouvement en direction de la position plus probable de
la source étant données les observations passées,
mouvement dans la direction avec plus grande probabilité de
détecter le produit, mouvement dans la direction plus
discriminatoire,...)
Ce travail devra être réalisé à l'I3S.
Connaissances requises
L'étudiant(e) doit avoir des bonnes connaissances en Probabillités et Statistiques et en Traitement du Signal, et avoir une bonne expérience de programmation en C et en Matlab.
Contacts
Maria-João Rendas (rendas@i3s.unice.fr)