Segmentation d'images naturelles basée sur une modélisation conjointe des régions
Description
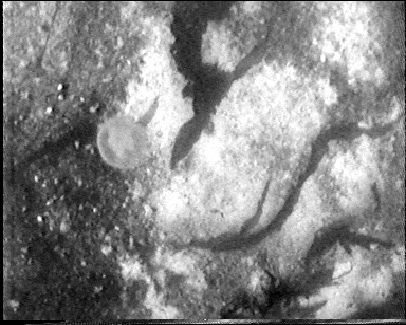
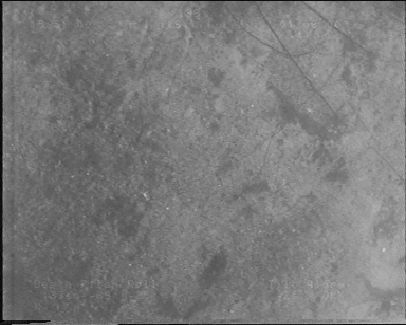
Le projet SAM (Systèmes Autonomes Mobiles) du Laboratoire I3S étudie la définition de systèmes de navigation pour des robots autonomes qui opèrent dans des milieux inconnus et non-structurés, et qui doivent construire, pendant leur opération, une carte de leur région de travail. En particulier, nous nous intéréssons au problème de classification d'images naturelles (du fond de l'océan) dans le contexte de la cartographie de maerl dans le Wyre Sound, Ecosse. Pour cet habitat naturel, l'apparence visuelle de certaines régions distinctes peuvent se ressembler fortement (c'est le cas pour le sable et le maerl mort ou pour le maerl vivant et des macro-algues, voir les images ci-dessus) et être difficilement discernables, même pour un observateur human. Cependant, l'observation du contexte dans lequel ces classes apparaissent peut fournir l'information nécessaire pour les distinguer.
La méthode implémentée en ce moment [1] classifie
individuellement chaque fenêtre de l'image, de la façon
suivante. La distribution statistique d'un certain nombre de
caractéristiques est d'abord estimée pour chaque
fenêtre, dans un premier pas. Dans une deuxième
étape, la fenêtre en question est classifiée en
utilisant un classificateur de Bayes, basé sur un modèle
de mélange pour chaque classe.
Le but de ce stage est de mettre en place une méthode classification qui utilise une caractérisation probabiliste de l'apparence conjointe des différentes classes sur une même image, c'est à dire, de la distribution conjointe de l'occurrence des caractéristiques utilisées pour la classification. Pour cela, nous devrons dans un premier temps construire une base d'apprentissage, avec des exemples d'images où plusieurs classes sont présentes. A partir de cette base d'apprentissage, les modèles de probabilité conjointe seront construits. Nous essayerons pour cette apprentissage deux approches: des méthodes de noyaux (généralisations des histogrammes) et des réseaux neuro-mimétiques. Une fois ces modèles construits, il faudra définir le classificateur Bayésien qui les utilise, et le tester sur des images réelles prises par le robot Phantom.

Le robot sous-marin Phantom est un robot téléopéré depuis la surface à l'aide d'un cable (ombilical) qui le relie à des ordinateurs à terre. Le Phantom est équipé de deux propulseurs horizontaux qui permettent son déplacement dans le plan horizontal (avant/arrière, tourner à gauche et à droite) et d'un moteur vertical qui contrôle son déplacement dans le plan vertical. Cette plate-forme est équipée de capteurs de navigation (compas trois axes, gyroscope, capteur d'immersion (pression), et de compteurs qui mesurent la vitesse de rotation des axes de ses moteurs), et de capteurs qui permettent l'observation de l'environnement: une caméra vidéo (avec pan & tilt), un sonar profileur (à balayage mécanique, monté sur une plate-forme tilt) et un altimètre (mesure de l'altitude par rapport au fond de l'océan).
Ce travail devra être réalisé à l'I3S.
Connaissances requises
L'étudiant(e) doit avoir des bonnes connaissances en Probabillités et Statistiques et en Traitement du Signal, et avoir une bonne expérience de programmation en C/C++.
Contacts
Maria-João Rendas (rendas@i3s.unice.fr) ou Christian Barat (barat@i3s.unice.fr)
Le projet SAM (Systèmes Autonomes Mobiles) du Laboratoire I3S étudie la définition de systèmes de navigation pour des robots autonomes qui opèrent dans des milieux inconnus et non-structurés, et qui doivent construire, pendant leur opération, une carte de leur région de travail. En particulier, nous nous intéréssons au problème de classification d'images naturelles (du fond de l'océan) dans le contexte de la cartographie de maerl dans le Wyre Sound, Ecosse. Pour cet habitat naturel, l'apparence visuelle de certaines régions distinctes peuvent se ressembler fortement (c'est le cas pour le sable et le maerl mort ou pour le maerl vivant et des macro-algues, voir les images ci-dessus) et être difficilement discernables, même pour un observateur human. Cependant, l'observation du contexte dans lequel ces classes apparaissent peut fournir l'information nécessaire pour les distinguer.
 |
 |
 |
Le but de ce stage est de mettre en place une méthode classification qui utilise une caractérisation probabiliste de l'apparence conjointe des différentes classes sur une même image, c'est à dire, de la distribution conjointe de l'occurrence des caractéristiques utilisées pour la classification. Pour cela, nous devrons dans un premier temps construire une base d'apprentissage, avec des exemples d'images où plusieurs classes sont présentes. A partir de cette base d'apprentissage, les modèles de probabilité conjointe seront construits. Nous essayerons pour cette apprentissage deux approches: des méthodes de noyaux (généralisations des histogrammes) et des réseaux neuro-mimétiques. Une fois ces modèles construits, il faudra définir le classificateur Bayésien qui les utilise, et le tester sur des images réelles prises par le robot Phantom.
Le robot sous-marin Phantom est un robot téléopéré depuis la surface à l'aide d'un cable (ombilical) qui le relie à des ordinateurs à terre. Le Phantom est équipé de deux propulseurs horizontaux qui permettent son déplacement dans le plan horizontal (avant/arrière, tourner à gauche et à droite) et d'un moteur vertical qui contrôle son déplacement dans le plan vertical. Cette plate-forme est équipée de capteurs de navigation (compas trois axes, gyroscope, capteur d'immersion (pression), et de compteurs qui mesurent la vitesse de rotation des axes de ses moteurs), et de capteurs qui permettent l'observation de l'environnement: une caméra vidéo (avec pan & tilt), un sonar profileur (à balayage mécanique, monté sur une plate-forme tilt) et un altimètre (mesure de l'altitude par rapport au fond de l'océan).
Ce travail devra être réalisé à l'I3S.
Connaissances requises
L'étudiant(e) doit avoir des bonnes connaissances en Probabillités et Statistiques et en Traitement du Signal, et avoir une bonne expérience de programmation en C/C++.
Contacts
Maria-João Rendas (rendas@i3s.unice.fr) ou Christian Barat (barat@i3s.unice.fr)
Références
- Image Segmentation by Unsupervised Adaptive Clustering in the Distribution Space for UAV Guidance Along Sea-bed Boundaries Using Vision, A. Tenas, M-J Rendas and J-P Folcher, Oceans'2001.