COMANOID stands for -Multi-Contact Collaborative Humanoids in Aircraft Manufacturing- is a RIA four-year European research project that started in January 2015 as part of the Horizon H2020 program.
A Cordis summary of the project can be found here : https://cordis.europa.eu/project/rcn/194280/brief/it?WT.mc_id=exp
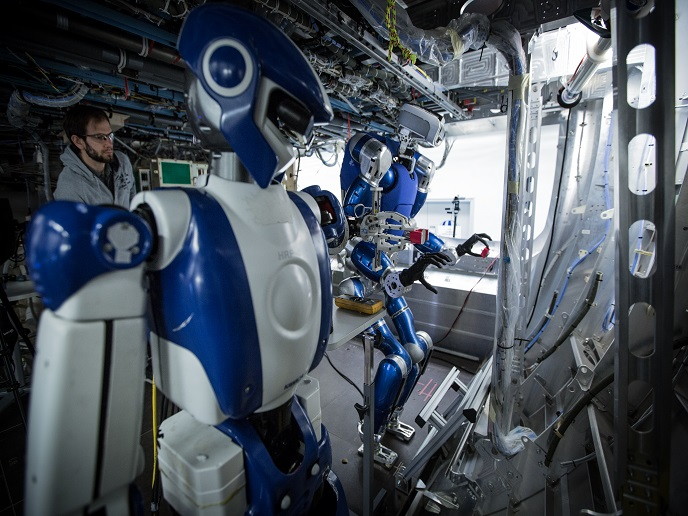
COMANOID aims at deploying humanoid robots to achieve non-added value tasks that have been identified by Airbus Group in aircraft assembly operations. The project focuses on showing precise accessibility (namely into areas where wheeled robots cannot be deployed) through whole body multi-contact planning motion with advanced embedded 3D dense SLAM localization and visuo-force servoing capabilities. Because the robots evolve in human worker co-localized spaces, safety issues have been specifically accounted for. The results of COMANOID has been showcased in a 1:1 scale demonstrator of a real aircraft using two humanoid robots: the HRP-4 position controlled humanoid robot provided by CNRS partner and the TORO torque controlled humanoid robot provided by DLR partner.
Goals
- To investigate the deployment of humanoid robots solutions in Airbus assembly operations that are laborious and inaccessible for wheeled platforms.
- To achieve Human-robot safe and operationally efficient collaboration
Technology concept description
- Explore multi-contact planning and control to increase robot balance and stability.
- Use of advanced visual-haptic servoing for perception and localization
- Creation of closed-kinematic chains in order to increase operational forces

Example of working environments inside the aircraft manufacturing factory
Related publications :
Closed-loop MPC with Dense Visual SLAM -Stability through Reactive SteppingArnaud Tanguy, Daniele de Simone, Andrew I. Comport, Giuseppe Oriolo, Abderrahmane KheddarICRA: International Conference on Robotics and Automation, May 2019, Montreal, Canada. In press 

Online eye-robot self-calibration Arnaud Tanguy, Abderrahmane Kheddar, Andrew ComportSIMPAR: Simulation, Modeling, and Programming for Autonomous Robots, May 2018, Brisbane, Australia. pp.68-73, ⟨10.1109/SIMPAR.2018.8376273⟩
Closed-loop MPC with Dense Visual SLAM-Stability through Reactive Stepping Arnaud Tanguy, Daniele de Simone, Andrew Comport, Giuseppe Oriolo, Abderrahmane Kheddar2018
Closed-loop RGB-D SLAM Multi-Contact Control for humanoid robotsArnaud Tanguy, Pierre Gergondet, Andrew Comport, Abderrahmane KheddarSII: Symposium on System Integration, Dec 2016, Sapporo, Japan. pp.51-57, ⟨10.1109/SII.2016.7843974⟩